Authors: Denis Vida (1), Damir Segon (2), Aleksandar Merlak (3)
(1) Department of Earth Sciences, University of Western Ontario, London, Ontario, N6A 5B7, Canada
(2) Astronomical Society Istra Pula, Park Monte Zaro 2, HR-52100 Pula, Croatia
(3) Istrastream d.o.o., Hum, Croatia
RMS overview and GMN
The Raspberry Pi Meteor Station (RMS) is open-source software for capture, detection, reduction and calibration of optical meteor data. The software was designed to run on cheap Raspberry Pi computers, but also has full functionality under Linux, and some parts of the codebase can also run under Windows.
The current default version of the system is using cheap IP cameras with either Sony IMX225 or IMX291 sensors and 3.6mm f/0.95 lenses. Such systems have a field of view of 87×45°, a resolution of 1280×720, and achieve a stellar limiting magnitude of +6.0 at 25 frames per second in decent sky conditions (varies from +5.2 under heavily light polluted skies, down to +6.5 in ideal conditions). Narrower lenses are supported as well, and an all-sky solution is being tested.
A new project called the Global Meteor Network (GMN) has been started with the motto “No Meteor Unobserved”, whose goal is to cover a large range of longitudes and continents and make sure that there exists a record of all important events in meteor science, from meteor shower outbursts to meteorite falls. Long term monitoring of the meteoroid environment is one of the goals as well.
Currently, there are more than 40 systems in 11 different countries, and the expansion is progressing at a fast pace. Figure 1 shows the map of countries (blue) participating in the project.

Figure 1. Countries with RMS stations – December 2018
2018 Geminids observations
The software and the hardware have been in the ‘beta’ phase for about a year now. After much development and rigorous testing, we present the first large scale observations and demonstrate the capability of the system to produce high quality data in near real time.
At the end of every night the system produces fully calibrated (both astrometry and photometry) detections of meteors in CAMS and UFOOrbit formats. Meteor trajectory estimation can be performed using either CAMS or UFO tools, while our in-house software is under development.
Here we present the results from two RMS stations in Croatia, one in Pula, other in Hum. Figure 2 shows the locations and the volumes of the fields of view up 120 km in altitude.

Figure 2. FOVs of the cameras. Figure generated using Google Earth and Geert Barentsen’s FOV3D code.
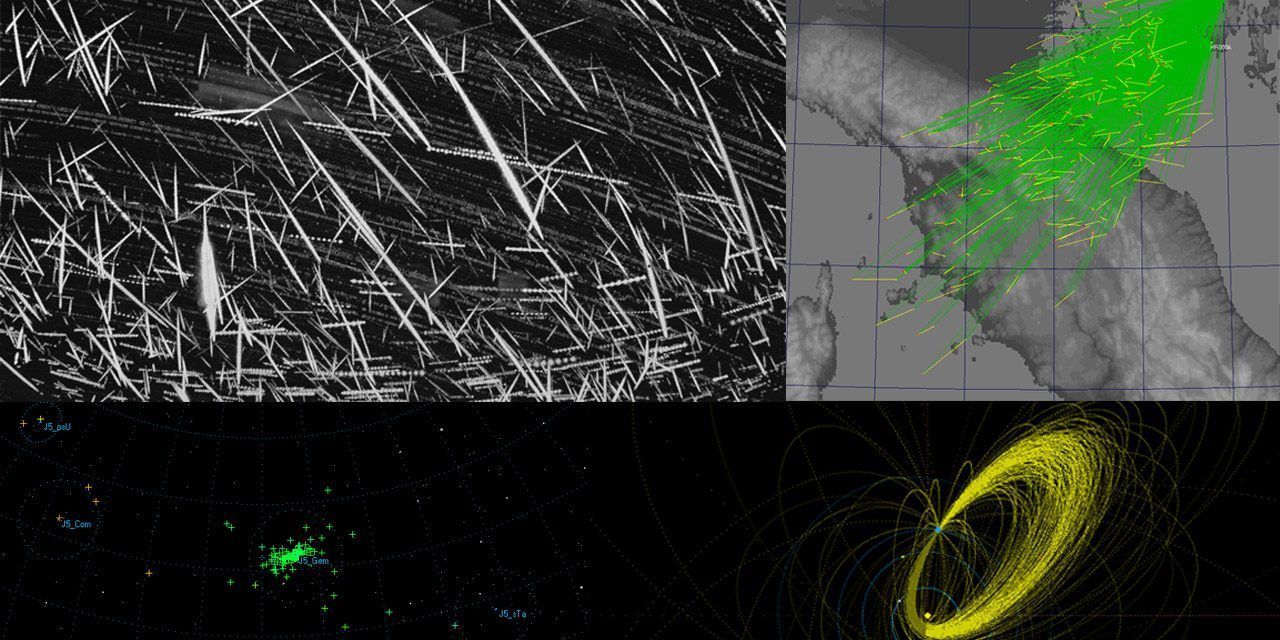
The data was collected on the night of December 14 to 15, 2018. The Hum camera is in dark sky conditions and it detected more than 900 meteors that night, as shown in figure 3.

Figure 3. Stack of more than 900 meteors detected from Hum.
On the other hand, Pula is a city with a population of 100 000 and it suffers from plenty of light pollution – this camera detected only 490 meteors (figure 4)

Figure 4. Stack of 490 meteors detected from Pula.
We used UFOorbit to estimate the trajectories of common meteors – due to the unfavorable geometry and non-optimal field of view overlap, there were only 155 meteors with the convergence angle Qc larger than 10° (and about 250 common meteors with Qc > 5°). Figure 5 shows the ground projection of paired trajectories. Due to the high sensitivity of the system, meteors as far as 400 km away were observed.

Figure 5. UFOorbit ground map of paired trajectories
The radiant scatter and the orbits are shown on figures 6 and 7. The majority of meteors observed that night were Geminids, with only a handful of sporadics.The radiant spread is fairly tight, but as it can be seen, raising the convergence angle threshold to 15° decreases the radiant dispersion significantly, which indicates that the meteors with a lower threshold suffer from great uncertainty in estimated parameters.

Figure 6. Comparison of the radinat spread depending on the convergence angle.

Figure 7. Orbits of the observed meteors.
Because UFOorbit uses a very simple two-point method of meteor trajectory estimation which disregards other points along the trajectory, the solution cannot be futher improved by dynamical constraints. The RMS code even fits a great circle on the observed meteor and projects the first and the last point to it, which minimizes the error. Nevertheless, the low convergence angle Qc is the dominant cause of the scatter, thus it is advised to use more advanced methods of meteor trajectory estimation. Such methods will become available in the near future and will be a part of the GMN processing pipeline.
Finally, we give all raw input data used to generate this short report (CAMS and UFO format), as well as the results in the UFOorbits format. Interested readers can download the data at this URL: 2018geminids_20181214_rms_data


{kind=link}